transPAF dynamically changes the points of application and direction of force to render realistic impact force for
versatile scenarios.
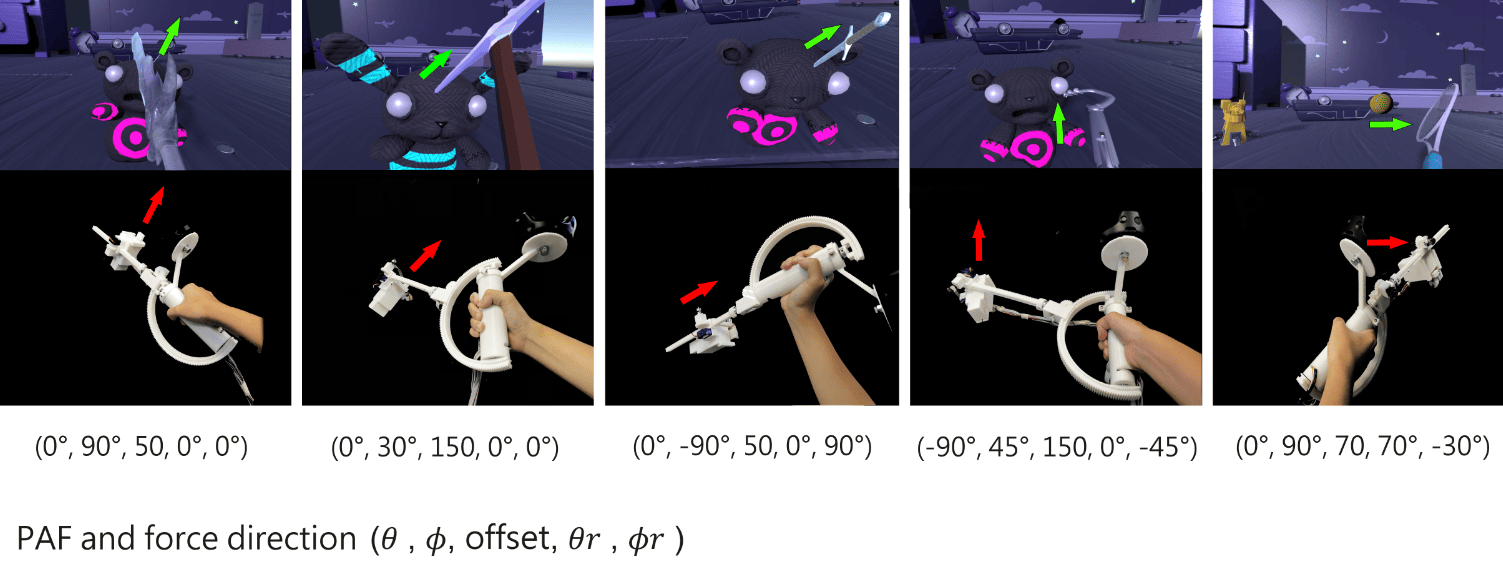
(Left) Depicts the user performing a stabbing motion with the sword. The point of application of force (PAF) should be strategically positioned at the sword’s tip, while the impact direction should be oriented towards the user.
(Center) The user is in the act of slashing with the sword. The PAF is located midway along the blade. The direction of impact should be perpendicular to the long axis of the sword.
(Right) The user is wielding a pickaxe. The PAF is directed at a 45-degree angle and the impact angle should be adjusted vertically to the arm movement.
transPAF
Haptic Revolver is a paper I worked on as the second author during my master’s degree in CS, introducing a highly dynamic and omnidirectional impact feedback mechanism that enhances realism and user immersion through precise control over the point and direction of the force application.
1. Introduction
At the core of our exploration is the concept that the realism of virtual environments largely depends on the haptic feedback provided by VR devices.
Consider playing a VR game where you wield various weapons or interact with different tools; the way these objects impact the environment should realistically reflect in the force feedback you feel. This is where our project, transPAF, comes into play. It’s designed to render omnidirectional impact feedback with dynamic Points of Application of Force (PAF) all around a controller, adjusting not just where but also how you feel the impact as you change the usage of the weapon or tool in the VR scenario.
2. Design of transPAF
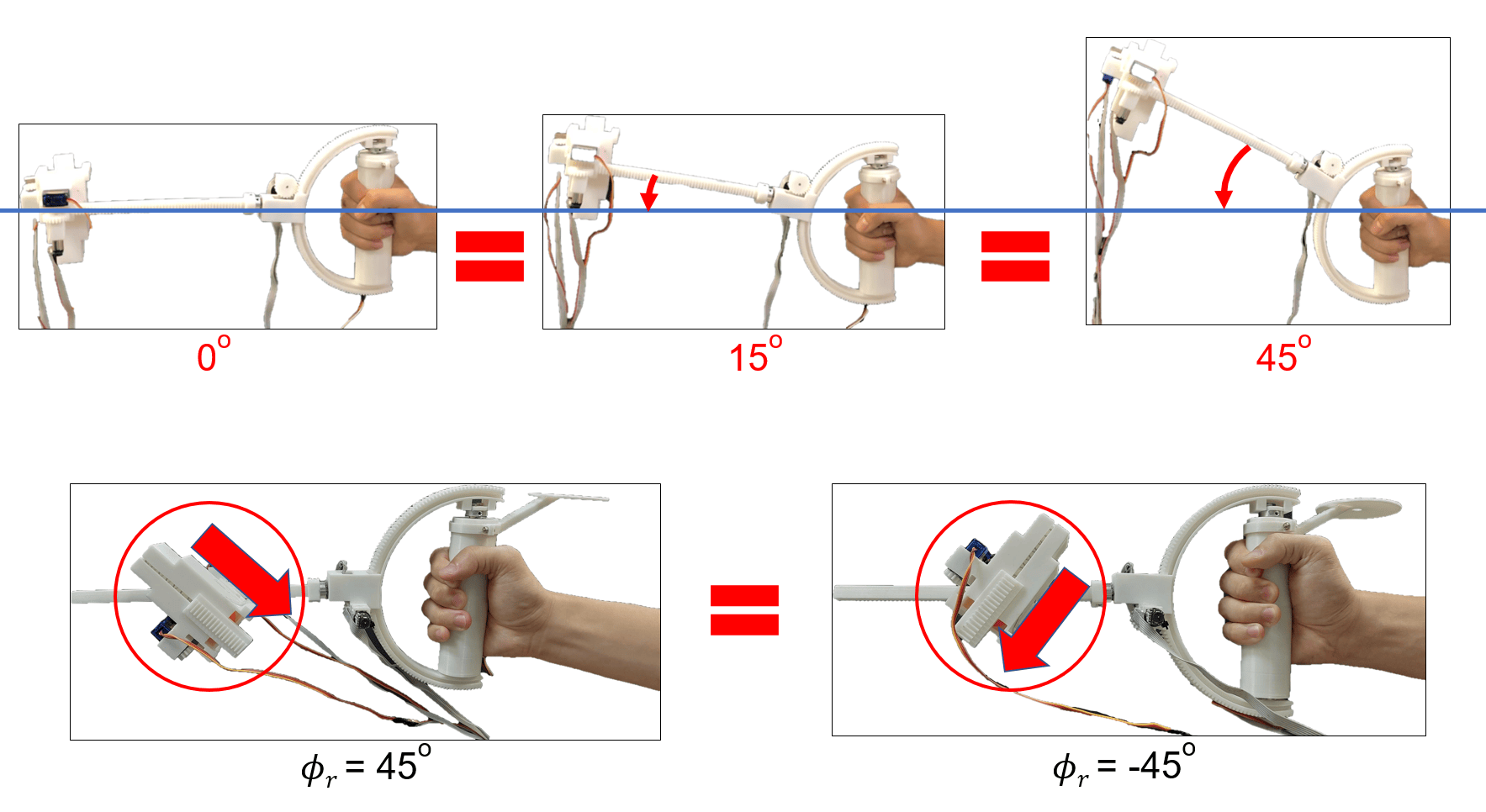
The controller comprises a semicircular track, a linear track, and an impactor—all of which are rotatable.
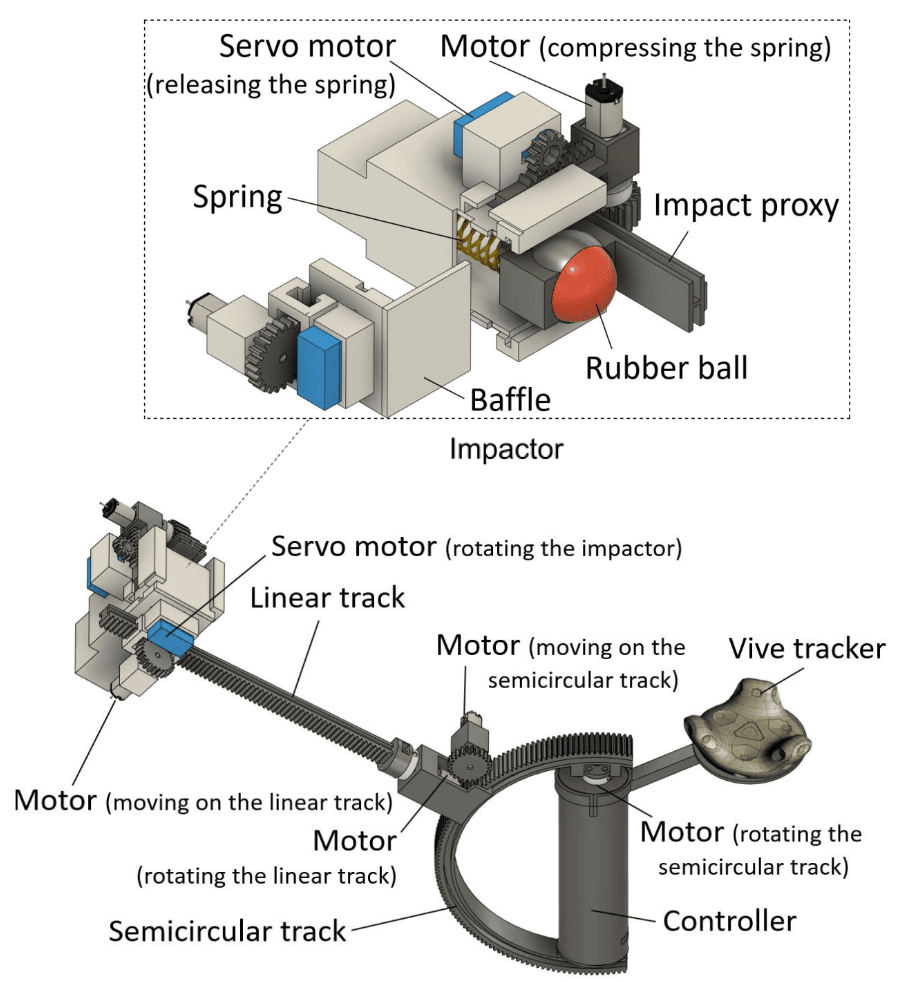
The hardware structure of the transPAF.
• transPAF utilizes a unique hardware setup consisting of a controller, semicircular track, linear track, and an impactor, all capable of rotational movement.
• This design allows the impactor to move to any position within the 3D space surrounding the controller and to rotate in any direction, fully independent of each other.
This setup allows the impactor to move to any position around the controller, essentially covering a complete sphere of interaction. This full range of movement is crucial for rendering true omnidirectional feedback.
By also allowing these components to rotate in any direction, we can simulate a realistic impact from any angle, making the VR experience more immersive and expressive.
transPAF offers a high degree of freedom in rendering impact position and direction, ensuring comprehensive feedback coverage virtually around the entire sphere of interaction.
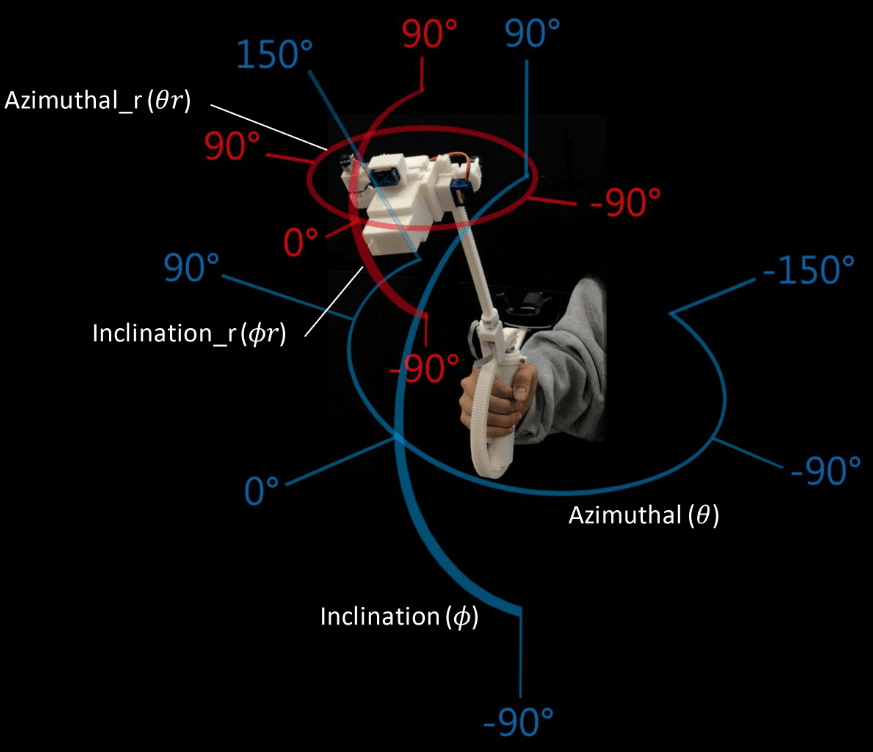
• The semicircular track rotates on the theta plane for the azimuthal angle in the spherical coordinate system and the 𝜃 range is from −150◦ to 150◦.
• The linear track moves on the phi plane for the inclination angle in the spherical coordinate system, and the 𝜙 angle range is from −90◦ to 90◦.
• To render omnidirectional impact, the impactor should rotate around two axes, which is similar to rotating on theta and phi planes in the spherical coordinate system, and the ranges of the azimuthal (𝜃𝑟 ) angle and the inclination (𝜙𝑟 )angle are −180◦ to 180◦ and −90◦ to 90◦, respectively.
3. Studies
To validate our design, we conducted two primary studies: a Just Noticeable Difference (JND) study and a VR experience study.
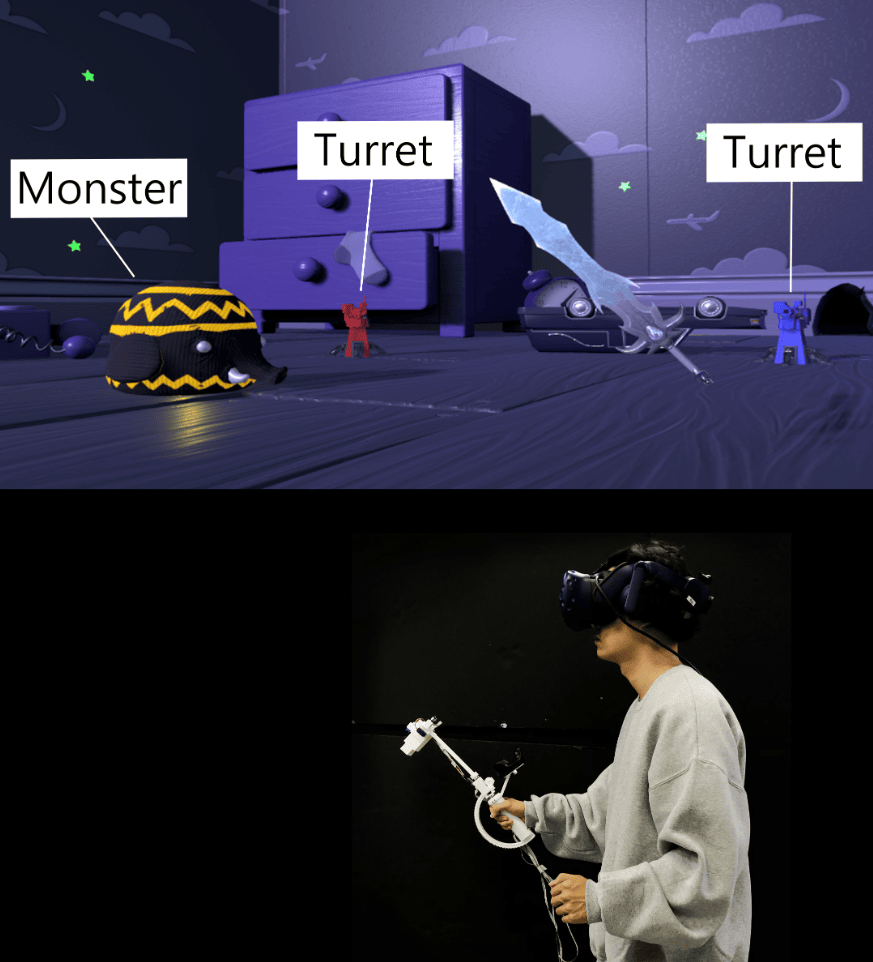
The panoramic view of the VR experience study, including weapons, monsters, and turrets.
• Participants use each weapon in a controlled sequence, interacting with monsters that appear one at a time or hitting tennis balls shot from turrets.
• This setup provided a vivid, comprehensive gauge of how dynamic PAF and force direction can significantly enhance realism and immersion in virtual environments. The careful calibration and design of VR interactions based on realistic haptic feedback models were central to achieving this advanced level of user experience.
Just Noticeable Difference study: The JND study helped us understand the smallest changes in position and direction of the impact that users can detect, which guided further refinement of transPAF’s responsiveness.
We set up guidelines derived from the JND study results to suggest crucial design parameters for virtual objects in VR environments, emphasizing the need for differences in PAF and force directions to exceed respective JND thresholds for perceivable contrast.
This approach aids in minimizing system latency by proposing changes to PAF and force direction only when exceeding these thresholds, thus optimizing both performance and user experience.
The guidelines are derived from the Just Noticeable Difference (JND) study result.
• The guidelines suggest that modifications to PAF’s position and force direction should be sufficiently substantial—beyond the determined JND thresholds—to be noticeable by users, fostering a more immersive and realistic VR experience.
• These guidelines help in minimizing system latency by recommending adjustments to PAF and force direction only when needed, effectively balancing system performance with user sensory experience
VR experience study: The subsequent VR experience study demonstrated that dynamic adjustments in PAF and force direction significantly improved the user’s sense of realism in VR environments.
The JND guidelines were utilized to set up realistic and differentiated interactive scenarios involving various virtual tools and actions, directly influencing the design and operation of transPAF under dynamic conditions.
In the VR scene, participants engaged with four different tools— a sword, a pickaxe, a hook and dagger, and a tennis racket—to perform various tasks such as attacking monsters and hitting tennis balls.
Sword: For slashing motions, the sword was programmed in such a way that its interaction with virtual monsters would vary based on which part of the blade struck. The PAF for slashing was assigned three distinct positions along the blade – from the tip to the handle – with corresponding setup parameters of PAF and force direction as (0°, 90°, 150, 0°, 0°), (0°, 90°, 50, 0°, 0°), and (0°, 90°, -50, 0°, 0°). These settings were designed to reflect the dynamic and varied impacts made by different parts of the sword during a slashing motion, providing a highly nuanced and realistic VR interaction
Pickaxe: Configured in a ‘T’ shape perfect for mining or combative motions, the pickaxe’s PAF and force direction settings were adjusted to (0°, 30°, 150, 0°, 0°), reflecting its usage for puncturing or digging. This configuration allowed realistic interaction when used against virtual obstacles or enemies.
Dagger: Similar to a small sword, typically used with a reverse grip for stabbing, the dagger’s PAF, and force directions were configured to (0°, −90°, 50, 0°, 90°), enabling precise impact at the tip, ideal for close combat scenarios in the VR setup[3].
Hook: Given its curved shape with the tip inward, typical of grappling tools, the hook’s PAF and force direction were set to (−90°, 45°, 150, 0°, −45°). This setup was intended to simulate the pulling or gripping action realistically when used in VR interactions.
Tennis Racket: Utilized in sports scenarios within the VR, the racket’s PAF was particularly dynamic, configured differently for forehand and backhand hits at a sweet spot: (0°, 90°, 70, 90°, 0°) and (0°, 90°, 70, −90°, 0°), respectively. This allowed for a realistic simulation of tennis, adjusting the impact based on the shot direction.
4. Conclusion
This research sets a new direction for VR haptics, moving us closer to highly realistic and dynamic feedback systems. The implications extend beyond gaming, potentially benefiting VR applications in training, education, and remote operations. The journey of transPAF from a concept to a refined VR tool continues, and we are excited about the future advancements that will further bridge the gap between virtual environments and realistic sensory feedback.
transPAF demonstration video.
transPAF: Rendering Omnidirectional Impact Feedback with Dynamic Point of Application of Force All Round a Controller
For more detailed insights into our research and findings, feel free to delve into our full paper, which is published in ACM CHI 2023.
Full paper: https://dl.acm.org/doi/abs/10.1145/3544548.3581092